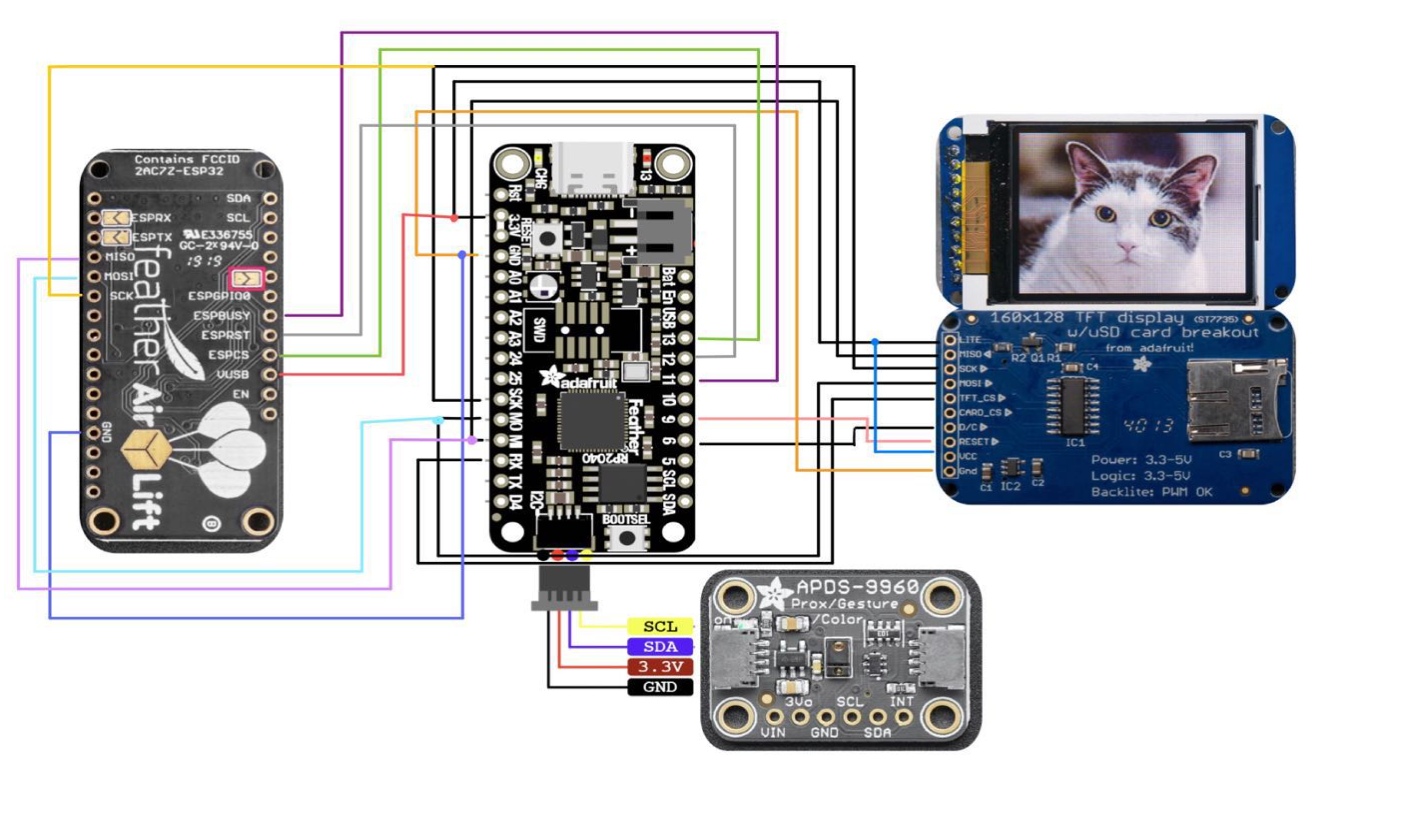
Components used:
Adafruit Feather RP2040
Airlift wifi module
APDS 9960 sensor
ST7735R
Adafruit STEMMA Speaker Relay
Circuit Playground Express
Several cables
Also, we connected the speaker and the Circuit Playground Express using a relay with the system below like this:
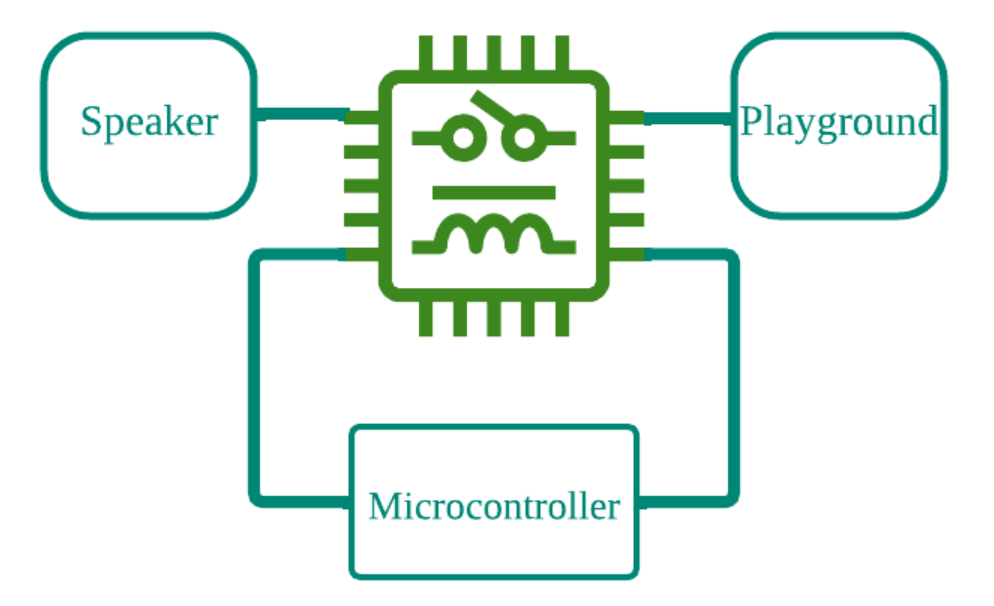

Circuit Playground with Adafruit Speaker
Because the speaker is controlled by Circuit Playground express, in this way we can use Microcontroller to control the speaker.
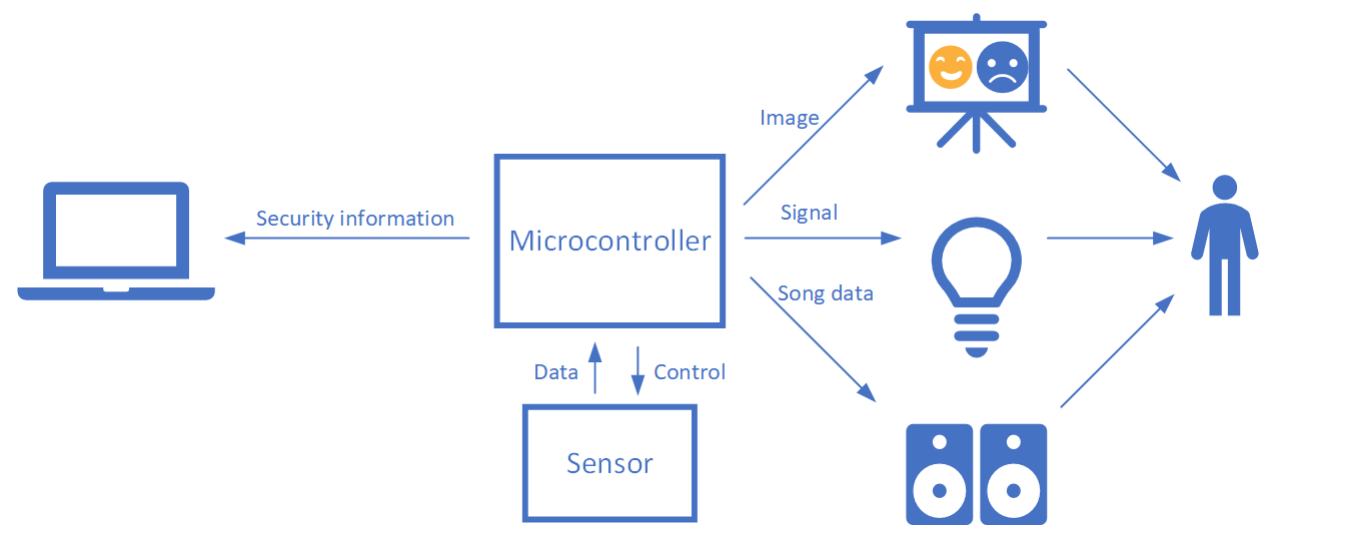
Block diagrams:
Description of your RP2040 dev environment:
We use Circuit Python language and Mu editor to finish our code. It is easier to make some functions code work together on the same microcontroller.
Code link:
import time
import board
import terminalio
import digitalio
import displayio
import busio
from adafruit_display_text import label
from adafruit_st7735r import ST7735R
from digitalio import DigitalInOut
from adafruit_apds9960.apds9960 import APDS9960
import adafruit_esp32spi.adafruit_esp32spi_socket as socket
from adafruit_esp32spi import adafruit_esp32spi
import adafruit_requests as requests
from adafruit_io.adafruit_io import IO_HTTP, AdafruitIO_RequestError
from random import randint
led = digitalio.DigitalInOut(board.A1)
led.direction = digitalio.Direction.OUTPUT
esp32_cs = DigitalInOut(board.D13)
esp32_ready = DigitalInOut(board.D11)
esp32_reset = DigitalInOut(board.D12)
# Release any resources currently in use for the displays
displayio.release_displays()
#spi0 = board.SPI()
spi0 = busio.SPI(board.SCK, board.MOSI, board.MISO)
#spi1 = board.SPI()
#tft_clk = board.SCK # SCL pin
tft_mosi = board.MOSI # SDA pin
tft_cs = board.RX
tft_dc = board.D6
tft_rst = board.D9
#wifi_clk = board.A0 # SCL pin
#wifi_mosi = board.A1 # SDA pin
#wifi_miso = board.A2
i2c = board.STEMMA_I2C()
sensor = APDS9960(i2c)
sensor.enable_proximity = True
try:
from secrets import secrets
except ImportError:
print("WiFi secrets are kept in secrets.py, please add them there!")
raise
display_bus = displayio.FourWire(spi0, command=tft_dc, chip_select=tft_cs, reset=tft_rst)
display = ST7735R(
display_bus, rotation=270, width=160, height=128, rowstart=0, colstart=0
)
#spi1 = busio.SPI(wifi_clk, wifi_mosi, wifi_miso)
#spi0 = busio.SPI(board.SCK, board.MOSI, board.MISO)
esp = adafruit_esp32spi.ESP_SPIcontrol(spi0, esp32_cs, esp32_ready, esp32_reset)
requests.set_socket(socket, esp)
print("Connecting to AP...")
while not esp.is_connected:
try:
esp.connect_AP(secrets["ssid"], secrets["password"])
except RuntimeError as e:
print("could not connect to AP, retrying: ", e)
continue
print("Connected to", str(esp.ssid, "utf-8"), "\tRSSI:", esp.rssi)
socket.set_interface(esp)
requests.set_socket(socket, esp)
# Set your Adafruit IO Username and Key in secrets.py
# (visit io.adafruit.com if you need to create an account,
# or if you need your Adafruit IO key.)
aio_username = secrets["aio_username"]
aio_key = secrets["aio_key"]
# Initialize an Adafruit IO HTTP API object
io = IO_HTTP(aio_username, aio_key, requests)
try:
# Get the 'temperature' feed from Adafruit IO
distance_feed = io.get_feed("distance")
except AdafruitIO_RequestError:
# If no 'temperature' feed exists, create one
distance_feed = io.create_new_feed("distance")
# Open the file
with open("/567.bmp", "rb") as bitmap_file1:
# Setup the file as the bitmap data source
bitmap1 = displayio.OnDiskBitmap(bitmap_file1)
# Create a TileGrid to hold the bitmap
tile_grid1 = displayio.TileGrid(
bitmap1,
pixel_shader = getattr(
bitmap1,
'pixel_shader',
displayio.ColorConverter()
)
)
# Create a Group to hold the TileGrid
group1 = displayio.Group()
# Add the TileGrid to the Group
group1.append(tile_grid1)
# Open the file
with open("/456.bmp", "rb") as bitmap_file0:
# Setup the file as the bitmap data source
bitmap0 = displayio.OnDiskBitmap(bitmap_file0)
# Add the Group to the Display
# Create a TileGrid to hold the bitmap
tile_grid0 = displayio.TileGrid(
bitmap0,
pixel_shader = getattr(
bitmap0,
'pixel_shader',
displayio.ColorConverter()
)
)
# Create a Group to hold the TileGrid
group0 = displayio.Group()
# Add the TileGrid to the Group
group0.append(tile_grid0)
while True:
gesture = sensor.proximity
if gesture < 50:
display.show(group1)
print("nobody is there")
time.sleep(0.5)
led.value = False
if gesture > 50:
random_value = gesture
display.show(group0)
led.value = True
print("Sending {0} to distance feed...".format(random_value))
io.send_data(distance_feed["key"], random_value)
print("Data sent!")
print("Retrieving data from distance feed...")
received_data = io.receive_data(distance_feed["key"])
print("Data from distance feed: ", received_data["value"])
time.sleep(0.01)